
常见的多关节机器人的结构主要是什么?
- 文章作者:
- 发布日期:2022/02/23
依照现在的生水平来说,这样的智能工业机器人为大家的生活带来了诸多便利。不免让人对它产生好奇,常见的多关节机器人的结构主要是什么?一起往下看吧。
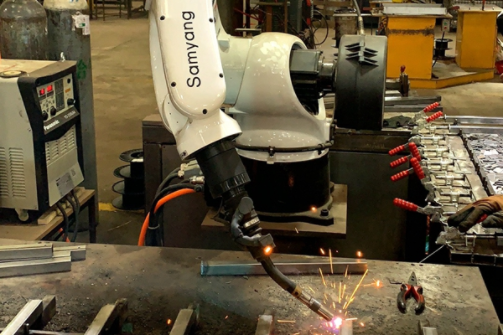
因为多关节机器人的作业范畴非常大,它可以将机械臂尾端专用工具以几乎随意视角置放在贴近无尽数目的水平上,因而它的主要用途十分普遍。例如在电焊焊接中,多关节机器人应用随意一种焊接技术都比职工进行的更具有持续性和精确性。当产品工件处在一定部位时,焊嘴可以精准定位最好的间距、视角和速率。即使产品工件不垂直平分机器人基座,机器人还可以运用3D激光发生器和视觉系统开展精准、可反复的检验。多关节机器人的别的使用包含喷涂、打孔、攻牙、激光切割、拿取、原材料运送、包裝和拼装。
多关节机器人并沒有严谨的界定,它被表述为具备固定不动底座,有4~6轴的关节。实际上,少至2轴和高达10轴的关节机器人也是有的。除此之外,机械臂尾端专用工具(EOAT)可以给予大量的健身运动选择项。多关节机器人的一个规范特点是他们可以在三维空间或工作中室内空间中工作中。多关节机器人较大的作业室内空间相近一个圆球,它通常应用极坐标系界定室内空间中的点。
常见的多关节机器人的结构主要是:精密减速机。这也是一种高精密的驱动力传递组织,其运用蜗轮的速率转化器,将电动机的旋转数降速到所需的旋转数,并获得比较大扭矩的设备,进而减少转速比,提升转距。
机器人关节处的降速传动系统,规定链条传动短、体型小、输出功率大、品质轻和易于控制,与此同时,针对中高负载的工业机器人,还必须非常的弯曲刚度、旋转精密度和运作精密度可靠性。
“多关节机器人的主要结构”如上文所述,三扬机器人提供自动焊接机器人、六轴工业机器人、四轴机械手、多关节机器人等,如有需要,请及时与我们联系。





