
如何理解工业机器人的工具中心点(TCP)?
- 文章作者:三扬机器人
- 发布日期:2020/09/21
工业现场的机器人实际上是有多个轴的机械手臂。要想让机器人完成指定的生产任务,通常需要在机器人的末端固定一个工具,比如焊接机器人的焊枪、涂胶机器人的胶枪、搬运机器人的夹具等。由于各工具的大小、形状各不相同。
“工具中心点”的英文名称为“Tool Central Point”,简写为“TCP”。初始状态的工具中心点(TCP)是工具坐标系(Tool Coordinate System)的原点。当我们以手动(Jogging)或者编程(Programming)的方式让机器人去接近空间的某一点时,其本质是让工具中心点去接近该点。因此可以说机器人的轨迹运动,就是工具中心点(TCP)的运动。
同一个机器人可以因为挂载不同的工具,而有不同的工具中心点;但是同一时刻,机器人只能处理一个工具中心点。比如,使用不同尺寸的焊枪,其枪口的位置肯定是不同的;但我们一次只能用一把焊枪,不能同时用两个。
工具中心点(TCP)有两种基本类型:移动式工具中心点(Moving TCP)和静态工具中心点(Stationary TCP)。移动式工具中心点(Moving TCP)比较常见,它的特点是会随着机器人手臂的运动而运动。比如焊接机器人的焊枪、搬运机器人的夹具等。

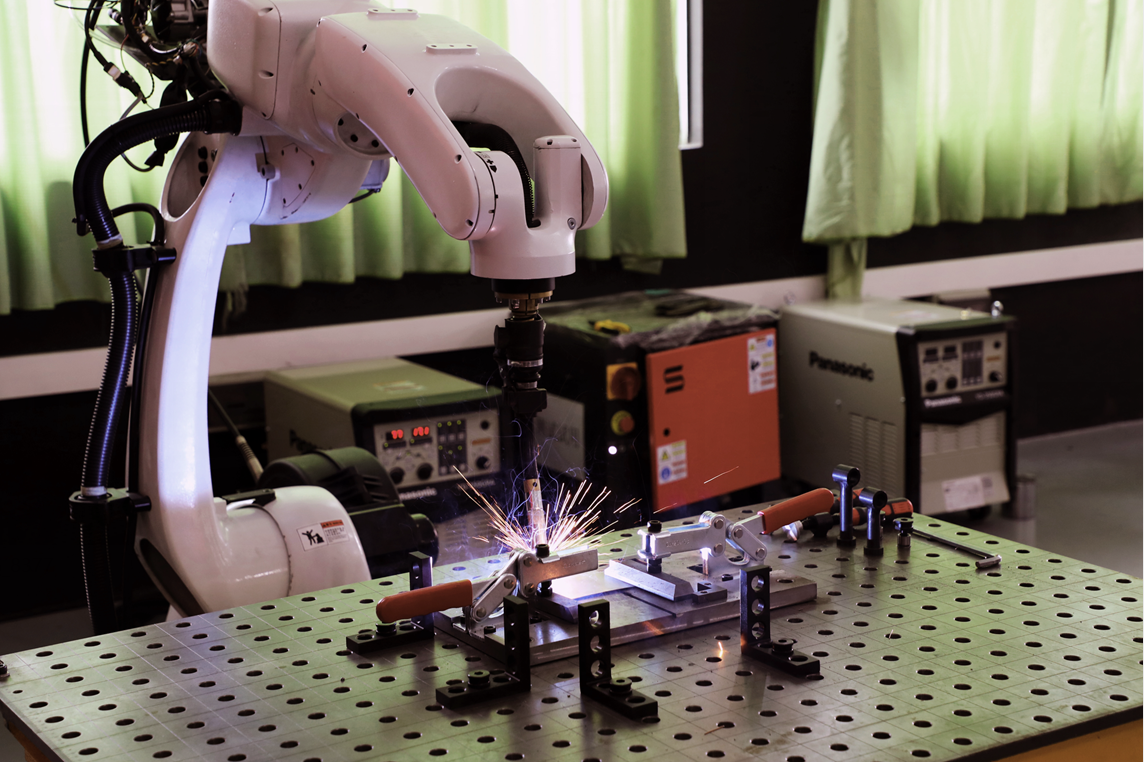
上图为三扬机器人客户使用现场
静态工具中心点(Stationary TCP)是以机器人本体以外的某个点作为中心点,机器人携带工件围绕该点做轨迹运动。比如在某些涂胶工艺中,胶枪喷嘴是固定的,机器人抓取玻璃围绕胶枪喷嘴做轨迹运动,该胶枪喷嘴就是静态工具中心点。
机器人调试时首先要设置工具数据(Tool Data),其内容包括设置工具中心点(TCP)、工具的重量和重心。ABB机器人在出厂时有一个默认的工具数据(tool0),tool0定义的TCP在机器人第六轴法兰盘的中心处(以六轴机器人为例)。在实际生产时要根据安装工具的不同,定义不同工具数据。比如下面这张图就有五个不同的工具数据(Tool Data)。
机器人的工具一般可以分为两大类:夹具类和枪类。对于夹具类,其工具中心点一般可以tool0的TCP为基准,向外延伸一段距离来确定;而对于枪类(比如焊枪、胶枪等),则需要用四点法来确定工具中心点。






